
Precise Positioning with GNSS rover
Posted by Philip Hanrahan B.E., B.A., M.I.E.I.; Dariusz Liszka B.E. (Elec. Eng.), M.I.E.I. on 1st Jun 2021
We’ve been talking about the GNSS rovers a lot. We all know how to use them (if you don’t we have great training courses to get you started), and how accurate they are.
But what’s inside that flat head at the top of the pogo? How does it work and why sometimes it doesn’t give us the results we’re expecting?
Modern and good looking small heads on the top of the poles held by surveyors and construction engineers are very sophisticated electronic devices packed with quite a lot of space and digital technology.
How is a GNSS rover designed?
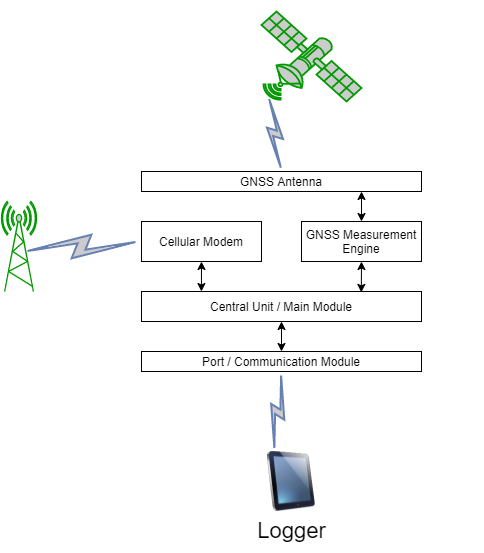
Measurement engine
The first and the most important module in the GNSS rover is the measurement engine.
All GeoMax rover receivers in example are using the latest technology from Novatel as the measurement engines.
This small yet powerful electronic device is the heart of the rover receiver and is responsible for receiving the analog signals from the antenna module. Measurement engine not only detects the radio frequency analog signals from the satellites but also processes them by decoding the messages carried by the signals. It also calculates the distance between the rover and the satellites. Knowing the position of and the distance to the satellites in space, the engine calculates the position of the rover by calculating the resection. This calculated position is still a raw position with accuracy which can be achieved by the modern smartphones. Of course reliability is much higher in case of surveying GNSS rovers. But the story of calculating the position is only half of the way at this point.
The raw initial position is sent to the supplier of the RTK corrections server and the server sends back the corrections, which are applied by the measurement engine to the position. Then the NMEA stream produced by the rover receiver gives an accurate position down to the milimeters.
Read more about RTK corrections in this article >>
Cellular modems
Here we are getting to the point where we can meet another module of our small “flying saucer” at the top of the pole: cellular modems.
These small devices are the source of access to the internet which is required to upload the position to the server and download the corrections from it.
It is worth mentioning that modern rover receivers (like GeoMax Zenith16) can work with the internet connection delivered by the handheld computer (tablet or data logger) and they do not need the cellular modem inside.
Corrections can be provided by the UHF modems as well. These types of modems can be used in remote areas to receive the corrections, however there has to be a transmitter of the corrections in close proximity (base).
Zenith35Pro GNSS receiver in standard configuration can be used either as a rover or a base as it has the UHF modem installed.

Antenna module
So we’ve been through the measurement engine, cellular modem and now it is time to mention the other parts of the rover receiver. They are also very important as they provide the external communication and also integrate all the modules together.
Antenna module is responsible for receiving the radio frequency signals from the satellites and is located just under the top cover of the rover receiver. It’s a precisely designed element with highest radio frequency sensitivity, allowing it to receive very weak satellite signals.
Communication module
The communication module is responsible for physical (wire) or remote (wireless) connection of the accessories with the rover receiver. Modern devices (like Zenith35 Pro) have Bluetooth, WiFi, USB and Serial communication allowed. These ports allow the rover receiver to connect to the field computer (data logger, laptop, tablet) as well as update the internal firmware of particular modules.
Main module
The last part is the main module which connects all of the peripherals together, supplies power and digital memory for the modules, delivers physical communication via keyboard panel and sometimes indicators (different colour lamps) or even LCD display.
That’s all when it comes to how the rover receiver is built. We can talk more about things like robustness or waterproofness but to be honest all of the rover receivers available on the market today are built to last and considering the fast pace of development of the satellite precise positioning before they got broken they will be out of date in terms of the used standards.
---
Have some questions? Email us at info@hitechniques.ie We'll be happy to help.